玩了幾天 BeagleBoard-xM(Rev.C) 後,開始切換到 PandaBoard(Rev.B) 啦,從硬體規格來看,PandaBoard 好上許多,多了內建無線網卡外,CPU 是 Dual-core ARM® Cortex™-A9 MPCore™ with Symmetric Multiprocessing (SMP) at 1.2 GHz each,比 BeagleBoard-xM 的 ARM® Cortex™-A8 1.0GHz 好不少,跑 Android ICS 可以順多了!另外,最大的好處是安裝 Android 流程方便,編譯步驟在 AOSP 都有提到,也不需像 BeagleBoard 透過過於繁複的指令來處理 SD 卡,就像惡搞 Android 手機一樣,採用 fastboot 指令來處理,十分方便,缺點大概會讓入門者少學到 SD 卡處理的事情。
以下是操作環境:
OS:Ubuntu 10.04 64-Bit Desktop (主要是在 VirtualBox 裡,Guest OS 跟 Host OS 都一樣)
Target:Panda Board ES Rev. B1 + 4GB microSD
在 VirtualBox 環境碰到的問題:
板子偵測時有時無?
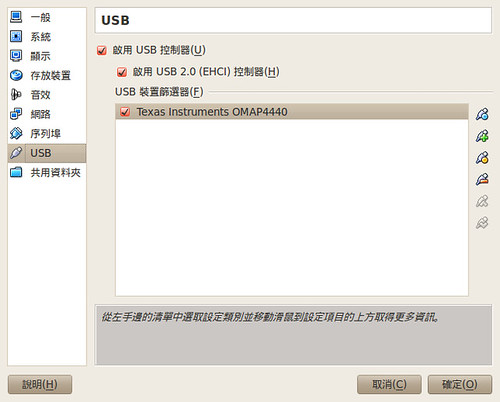
由於採用 VirtualBox 時,必須手動把 USB 裝置附加上去,因此需留意有那個項目可以使用,然而在 VirtualBox 的視窗上,一下可以看到板子,一下又找不到板子,這樣可好了,對我初學的我開始懷疑是線壞了還是板子壞了,在網路上搜尋的結果大多是說板子的power不夠,像是要用 Y 型 USB 接線,或是外接 5V 電源,但這兩樣我早就做好了,情況還是一樣,並可以在 /var/log/messages 看到 USB 一下接上,一下又斷掉。
$ tail -f /var/log/messages
...
kernel: [ 21.750370] usb 1-1: new high speed USB device using ehci_hcd and address 8
kernel: [ 21.952310] usb 1-1: configuration #1 chosen from 1 choice
kernel: [ 24.440886] usb 1-1: USB disconnect, address 8
kernel: [ 25.730824] usb 1-1: new high speed USB device using ehci_hcd and address 9
kernel: [ 25.953153] usb 1-1: configuration #1 chosen from 1 choice
kernel: [ 28.431670] usb 1-1: USB disconnect, address 9
...
可能現象及處理方式:
對非使用 VirtualBox 環境者,並不需要處理他,我猜是硬體的設計吧?讓此硬體處於可被偵測狀態,但不知為何理由要不斷斷線(省電?等待指令?),無論如何,對於 VirtualBox 使用者而言,需要小作處理,讓板子可以自動附加到 VM 中,不然一直靠手動就糗大了。首先在 VirtualBox 的 VM 開啟前先作設定 USB 相關設定,趁可以偵測到時,把他弄成自動附加即可。
其他:
記得把目前得使用者加到 vboxusers group 裡喔 (/etc/group vboxusers:x:XXX:YourHostAccount)
主要流程:
編譯 Android ICS:
大致上流程如 AOSP 所提的環境及編法,只是在編譯前,要先安置好 PandaBoard 所需的硬體資訊,這對編過 AOSP for Android 手機的人來說應該不陌生(以 Nexus One 為例,早期需透過 extract-files.sh 取出),對於 PandaBoard 來說,請直接在 http://code.google.com/android/nexus/drivers.html#panda 下載,
$ mkdir ~/bin ~/projects/android-ics
$ curl https://dl-ssl.google.com/dl/googlesource/git-repo/repo > ~/bin/repo
$ chmod 755 ~/bin/repo
$ export PATH=$PATH:~/bin/repo
$ cd ~/projects/android-ics
$ repo init -u https://android.googlesource.com/platform/manifest
$ repo sync
$ source build/envsetup.sh
$ lunch full_panda-eng
$ make fastboot
$ wget https://dl.google.com/dl/android/aosp/imgtec-panda-itl41d-dfebf249.tgz (這是 Android 4.0.1 (ITL41D) 版本)
$ tar -xvf imgtec-panda-itl41d-dfebf249.tgz
$ wget https://dl.google.com/dl/android/aosp/imgtec-panda-iml74k-cfb7bdad.tgz (這是 Android 4.0.3 (IML74K) 版本)
$ tar -xvf imgtec-panda-iml74k-cfb7bdad.tgz
$ wget https://dl.google.com/dl/android/aosp/imgtec-panda-imm76i-67545da7.tgz (這是 Android 4.0.4 (IMM761) 版本,建議上官網查看最新版)
$ tar -xvf imgtec-panda-imm76i-67545da7.tgz
$ ./extract-imgtec-panda.sh
輸入 I ACCEPT
$ make -j 2 (看自己是幾核心 CPU,我在 VM 配置 2 CPU)
依硬體狀況漫長等待後,沒意外就都有編好了
設置 PandaBoard:

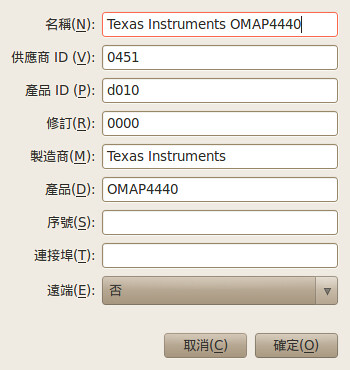
一開始把記憶卡拔掉,接上電源及 USB 線後,可以看到靠近 SD 卡插槽有一個燈在亮(對VirtualBox來說,USB裝置可以間斷地偵測到Texas Instruments OMAP4440設備),接著透過 usbboot 指令把 bootload 餵進去後,就可以看到另一個燈閃動(對VirtualBox來說,USB裝置可以穩定偵測到Texas Instruments panda設備,請記的手動附加一下)
$ cd ~/projects/android-ics
$ sudo device/ti/panda/usbboot device/ti/panda/bootloader.bin
using built-in 2ndstage.bin
reading ASIC ID
CHIP: 4440
IDEN: 0000000000000000000000000000000000000000
MPKH: 0000000000000000000000000000000000000000000000000000000000000000
CRC0: ########
CRC1: 00000000
sending 2ndstage to target... ########
waiting for 2ndstage response...
sending image to target...
檢查是否偵測到裝置(對VirtualBox使用者,需手動附加偵測到的 Texas Instruments panda 設備):
$ sudo out/host/linux-x86/bin/fastboot devices
################ fastboot
接上 SD 卡後:
$ sudo out/host/linux-x86/bin/fastboot oem format
...
OKAY [ 0.420s]
finished. total time: 0.421s
$ sudo out/host/linux-x86/bin/fastboot flash xloader device/ti/panda/xloader.bin
sending 'xloader' (23 KB)...
OKAY [ 0.024s]
writing 'xloader'...
OKAY [ 0.248s]
finished. total time: 0.272s
$ sudo out/host/linux-x86/bin/fastboot flash bootloader device/ti/panda/bootloader.bin
sending 'bootloader' (157 KB)...
OKAY [ 0.110s]
writing 'bootloader'...
OKAY [ 0.303s]
finished. total time: 0.413s
$ sudo out/host/linux-x86/bin/fastboot erase cache
erasing 'cache'...
OKAY [102.520s]
finished. total time: 102.520s
$ sudo out/host/linux-x86/bin/fastboot -p panda flash userdata
sending 'userdata' (10504 KB)...
OKAY [ 6.411s]
writing 'userdata'...
OKAY [ 9.763s]
finished. total time: 16.174s
$ sudo out/host/linux-x86/bin/fastboot -p panda flashall
--------------------------------------------
Bootloader Version...: U-Boot 1.1.4-g157fe435
Baseband Version.....:
Serial Number........: ################
--------------------------------------------
checking product...
OKAY [ 0.006s]
sending 'boot' (3750 KB)...
OKAY [ 2.331s]
writing 'boot'...
OKAY [ 2.381s]
sending 'system' (146598 KB)...
OKAY [ 89.414s]
writing 'system'...
OKAY [119.862s]
rebooting...
finished. total time: 215.212s
接著正確寫入後系統會自行重開機,大概 15 分左右就好了!記得要插好 USB 滑鼠,因為 Android 初始化沒多久就會黑屏休息,需要用滑鼠移動一下讓他清醒
各指令對應的 ttyUSB0 的輸出:
卸下 SD 卡開機:
[ aboot second-stage loader ]
MSV=00000000
jumping to 0x82000000...
U-Boot 1.1.4-g157fe435 (Oct 21 2011 - 09:46:20)
Load address: 0x80e80000
DRAM: 1024 MB
Flash: 0 kB
Using default environment
In: serial
Out: serial
Err: serial
efi partition table:
Read not permitted as Card on SLOT-0 not Initialized
efi partition table not found
Net: KS8851SNL
Panda: GPIO_113 pressed: entering fastboot....
I2C read: I/O error
Device Serial Number: ################
Fastboot entered...
$ sudo out/host/linux-x86/bin/fastboot oem format
blocks 15661056
new partition table:
256 128K xloader
512 256K bootloader
2048 8M recovery
18432 8M boot
34816 512M system
1083392 256M cache
1607680 512M userdata
2656256 2254M media
$ sudo out/host/linux-x86/bin/fastboot flash xloader device/ti/panda/xloader.bin
Starting download of 23824 bytes
downloading of 23824 bytes finished
writing to partition 'xloader'
Initializing 'xloader'
Writing 'xloader'
Writing 'xloader' DONE!
$ sudo out/host/linux-x86/bin/fastboot flash bootloader device/ti/panda/bootloader.bin
Starting download of 161236 bytes
....
downloading of 161236 bytes finished
writing to partition 'bootloader'
Initializing 'bootloader'
Writing 'bootloader'
Writing 'bootloader' DONE!
$ sudo out/host/linux-x86/bin/fastboot erase cache
Initializing 'cache'
Erasing 'cache'
Erasing 'cache' DONE!
$ sudo out/host/linux-x86/bin/fastboot -p panda flash userdata
Starting download of 10756436 bytes
...
downloading of 10756436 bytes finished
writing to partition 'userdata'
Initializing 'userdata'
fastboot: userdata is in sparse format
sparse: write to mmc slot[0] @ 1607680
sparse: out-length-0x512 MB
Writing sparsed: 'userdata' DONE!
$ sudo out/host/linux-x86/bin/fastboot -p panda flashall
Starting download of 3840000 bytes
...
downloading of 3840000 bytes finished
writing to partition 'boot'
Initializing 'boot'
Writing 'boot'
Writing 'boot' DONE!
Starting download of 150116688 bytes
...
downloading of 150116688 bytes finished
writing to partition 'system'
Initializing 'system'
fastboot: system is in sparse format
sparse: write to mmc slot[0] @ 34816
其他:
第一次使用 8GB 記憶卡,但是在 fastboot -p panda flashall 指令時,看到卡在 system.img 的寫入,網路上也看不到解法?後來甚至把 flashall 改成一步步時,仍卡在 fastboot flash system system.img 的部分,最後則是乾脆換一張 4GB 記憶卡,沒錯,這樣就沒問題了!看來玩硬體就是容易把生命浪費在其他硬體身上 XD 重點那張 8GB microSD (+轉卡) 是新卡啊,還是那種要拆包裝的耶。